
Tekst Vanessa Strijbosch
Foto John van Helvert
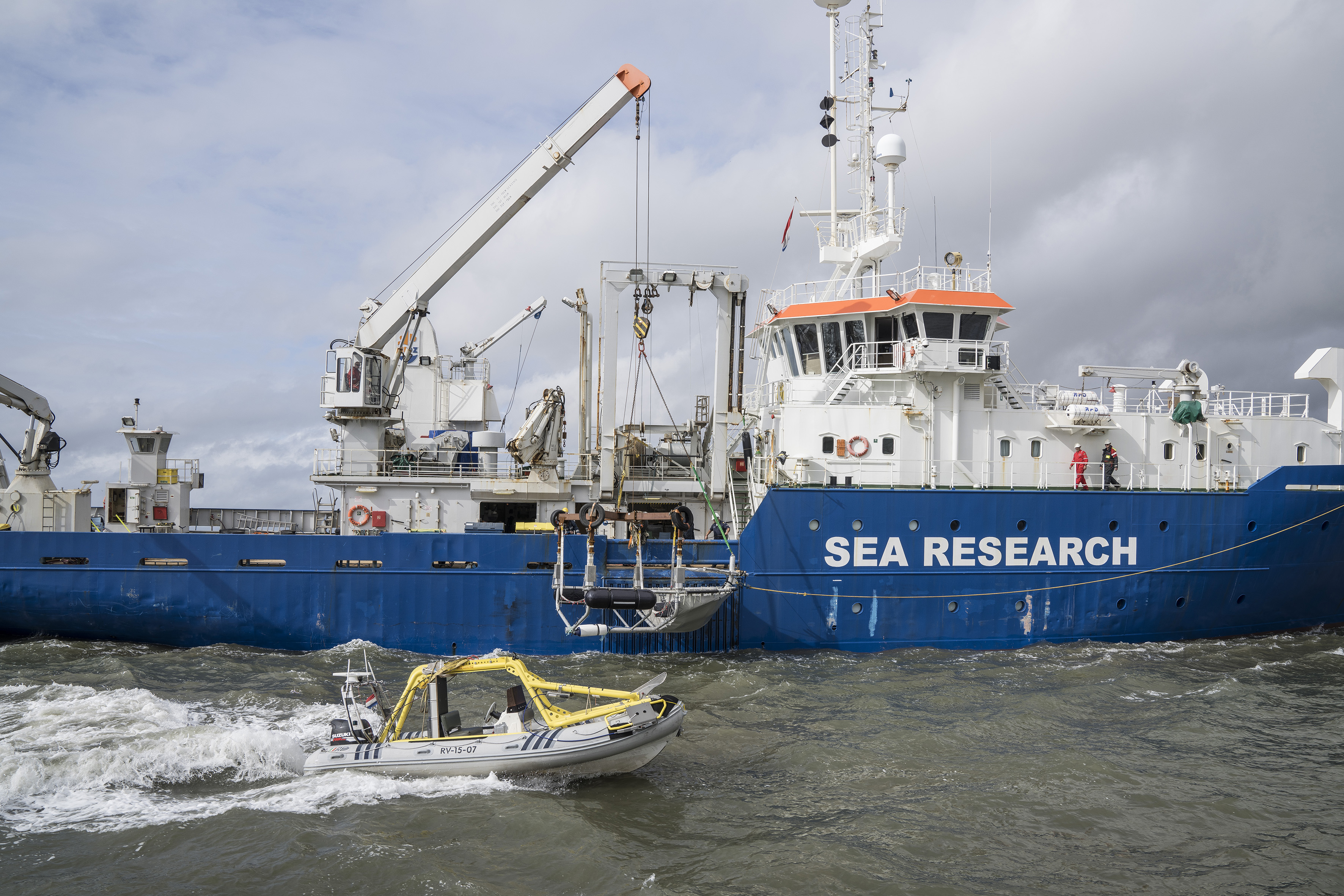
Nieuw launch & recovery-systeem getest
Onbemande vaartuigen krijgen in de toekomst een steeds grotere rol. De vervanger van de M-fregatten moet geschikt zijn om er in de toekomst mee te werken. En ook de mijnenbestrijding bereidt zich voor op de komst van onbemande vaartuigen, die zowel onder water (UUV's) als boven water (USV’s) opereren. Maar, hoe komen die vaartuigen zo veilig mogelijk van én aan boord, zonder (directe) menselijke tussenkomst? Een vraagstuk waarover DMO zich al jaren buigt. De oplossing lijkt nabij en werd afgelopen 2 weken voor het eerst op open zee getest.

Het is een gek gezicht. Een RHIB zonder bestuurder die rakelings langs een schip vaart. Met opvallend gemak vaart het op afstand bestuurde vaartuig in een metalen constructie, een soort mandje in de vorm van een boot. Een harde doffe klik is op afstand te horen. Het vaartuig koppelt zich vast aan de constructie, die speels op de golven naast het schip dobbert. De RHIB zit muurvast en wordt al hangend in speciale banden in de metalen kooi aan boord gehesen.

Makkelijk en veilig
Neerlaten en binnenhalen van RHIB’s behoren tot de meest gebruikte procedures aan boord van schepen. Het gebeurt op verschillende manieren: langszij, met behulp van de scheepskraan, in een dok of via de slipway, achterin het schip. Er komen steeds meer verschillende types (on)bemande vaartuigen bij, die elk makkelijk en veilig van en aan boord moeten kunnen komen.

‘Het is ondoenlijk om iedere keer een nieuw boardingsysteem te ontwikkelen’
Meerdere opties
“Vergelijk het met een auto”, legt projectengineer Scheepsbouw van de Defensie Materieel Organisatie (DMO) Erik Takken beeldend uit. “Er zijn duizenden types, maar die moeten wel in dezelfde garage passen. Je wilt niet telkens een nieuwe garage bouwen als je een andere auto krijgt. Zo ook met een schip. Het is ondoenlijk om iedere keer een nieuw boardingsysteem te ontwikkelen.”

Standaardisatie en veiligheid zijn de sleutelwoorden volgens de projectengineer van DMO. Vanaf 2010 is hij samen met onderzoeksinstituut MARIN bezig met het bedenken van een nieuw launch & recovery-systeem voor de toekomstige kleine vaartuigen. Onder de naam JIP LAURA Launch & Recovery werkten Defensie, organisaties en onderzoeksinstituten uit Nederland, Australië, Frankrijk en Engeland aan meerdere opties.
Na jaren van conceptueel denken, talloze simulaties en modeltesten bleven 3 denkrichtingen over: de cradle, de floating capture device en de side planar.
Cradle
Een drijvende metalen constructie in de vorm van een boot die als een soort ‘opvangbak’ dient voor het (on)bemande vaartuig, zoals een RHIB. Dit vaart de cradle in en haakt zich automatisch aan de voorkant vast. De voorvanglijn sleept de cradle stabiel langs het schip mee. Een hijslijn, bevestigd aan een scheepskraan, trekt de constructie inclusief RHIB omhoog het dek op.

Floating capture device
De onderzoekers noemen de uitvoering van dit concept ook wel de ‘HEMA-worst’, vanwege de vorm. De constructie is een stuk kleiner en lichter dan de cradle. Het automatische ‘inhaakprincipe’ werkt echter precies hetzelfde. Een (on)bemand vaartuig klikt zich automatisch vast. Dan gaat de hijslijn omhoog via een telescooparm. Deze wordt met een pikhaak vastgepakt en aan de hijskraan bevestigd. Vervolgens wordt de constructie omhoog gehesen en aan dek gezet.

Side planar
Het principe van een side planar lijkt op die van een scheerboord, een toepassing op vissersschepen of oude mijnenjagers. De floating capture device (FCD) vormt samen met het varende moederschip een soort fuik. Het touw tussen het moederschip en de FCD kan bijvoorbeeld een kooi met een uit het water stekende haak vangen. In de kooi kan een klein unmanned underwater vehicle (UUV) zitten. De kooi met de UUV kan vervolgens dokken of aan boord gehaald worden.

‘Een mooi momoment; er werd zelfs gejuicht’
Eerste keer
Takken kijkt tevreden terug op de tests die vorige week op het Marsdiep plaatsvonden. Hoofdrollen waren weggelegd voor onderzoeksschip Pelagia van onderzoeksinstituut NIOZ en een omgebouwde RHIB van de genie, die een tweede leven als testvaartuig bij DMO kreeg. Takken durft te stellen dat dit de eerste keer is dat een onbemand vaartuig neergelaten en volledig onbemand is binnengehaald op open zee. “Een mooi moment: er werd zelfs gejuicht”, aldus de scheepsbouwkundig ingenieur.

Aanbeveling
Het JIP LAURA Launch & Recovery-project nadert de afronding. Uiteindelijk worden de testresultaten geëvalueerd met als hoofddoel een aanbeveling aan de NAVO. De onderzoekers denken hier nog een half jaar voor nodig te hebben.









{kind=link}